The Wartime Origins of Iran’s Drone Program

Before this war started, I was working on a piece about Iranian thinking on deterrence and the role of Iran’s missile force. I finally had some time today to do my normal research and ended up reading a book on the history of Iran’s UAV program. Given how much attention Iranian drones receive today, it seemed worth writing a short post on how the program actually began—both because the topic is timely and because the origins of the program are interesting.
Like almost everything with the Iranian military, Iran’s drone program began with the Iran-Iraq War. Cut off from foreign suppliers and increasingly unable to conduct aerial reconnaissance with manned aircraft, Iranian commanders faced a growing intelligence gap on the battlefield. In response, engineers and military units began experimenting with small radio-controlled aircraft equipped with cameras, an improvised attempt to observe Iraqi positions without risking scarce aircraft or pilots.
Early in the war, aerial reconnaissance was carried out by RF-4 Phantom aircraft inherited from the Shah’s air force, which provided the photographs necessary to map Iraqi defensive positions and plan offensives. But by the mid-1980s that capability had deteriorated sharply. Aircraft losses, maintenance shortages, sanctions that restricted spare parts, and the growing risk of flying reconnaissance missions over heavily defended Iraqi territory made regular aerial photography increasingly difficult. Without those images, commanders preparing major operations faced the prospect of planning attacks with incomplete or outdated information.
The loss of reconnaissance created a tactical gap that ground intelligence could not fill. Iranian reconnaissance patrols could observe Iraqi front lines, but they could not safely penetrate deep defensive networks without suffering heavy casualties. The Intelligence and Operations Unit of Khatam al-Anbiya Headquarters, the IRGC’s main operational command, relied heavily on aerial imagery to map Iraqi defensive systems, artillery positions, and troop movements. When the air force began restricting reconnaissance flights in 1983 due to aircraft shortages and operational risks, Khatam al-Anbiya Headquarters was effectively left without a reliable way to observe Iraqi rear positions.
Domestic Research
The earliest research and development effort for an indigenous drone program emerged from a combination of wartime necessity, existing aerospace infrastructure, and experimentation within Iran’s universities. One important piece of that ecosystem was the Iranian Aircraft Manufacturing Industrial Company (HESA) in Isfahan. Before the revolution, HESA had been established to produce light aircraft and trainer jets for the Imperial Iranian Air Force as part of the Shah’s broader effort to develop a domestic aviation industry. After the revolution severed Iran from foreign suppliers and spare parts, much of that industrial base was left without the components required to continue licensed aircraft production. Engineers at facilities like HESA, therefore, began turning toward projects that could be pursued with domestically available materials, including small unmanned aircraft.
At the same time, early exploratory work on unmanned systems had begun within the defense establishment itself. Mostafa Chamran, who served as a senior figure in the Ministry of Defense during the early years of the war, reportedly initiated preliminary efforts to explore remotely controlled aircraft for reconnaissance. The first practical advances, however, came from outside formal military laboratories. Engineering teams associated with the university jihad movement—particularly at Isfahan University, Isfahan University of Technology, Sharif University of Technology, and Shiraz University—began experimenting with remotely controlled model aircraft capable of carrying lightweight cameras.
Among these efforts, the group working through the University Jihad workshop in Isfahan achieved the first meaningful breakthrough, building a small aircraft able to capture aerial photographs from altitude. These early systems were essentially modified model aircraft, constructed from lightweight materials and powered by small engines similar to those used in hobby aircraft. Cameras were mounted inside the fuselage and triggered during flight to capture aerial imagery. Under the supervision of commanders from Khatam al-Anbiya Headquarters, these prototypes were eventually tested near the war front, where engineers from the Isfahan team flew aircraft capable of photographing Iraqi positions. The results were encouraging enough that IRGC commanders concluded that such systems could partially replace conventional reconnaissance flights. The Isfahan workshop effectively became the nucleus of Iran’s early UAV development effort.
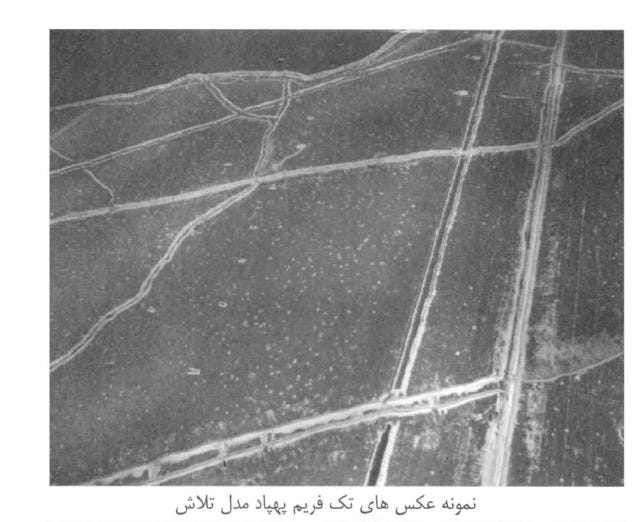
From these experiments emerged the first operational Iranian unmanned aircraft. One of the earliest platforms was the Talash series, a small reconnaissance UAV designed to carry cameras and provide aerial imagery of enemy positions. These aircraft were relatively simple but proved capable of flying over Iraqi defensive lines and returning with photographs that could be developed and analyzed by intelligence officers. The Talash designs evolved into successive variants—Talash 1, 2, and 3.

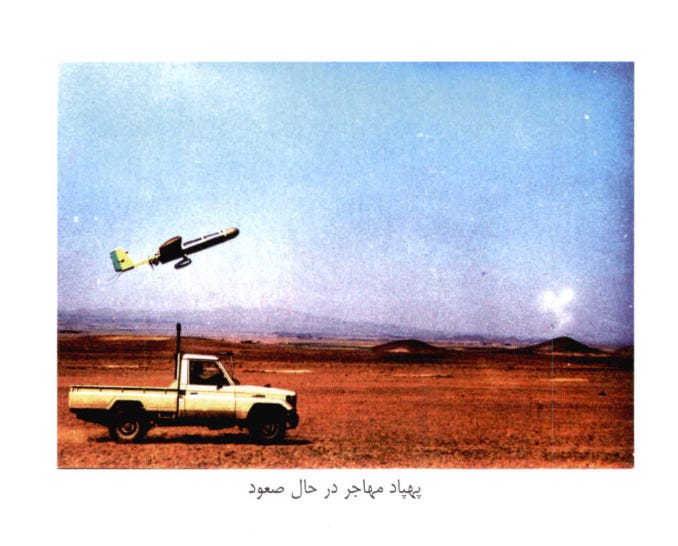
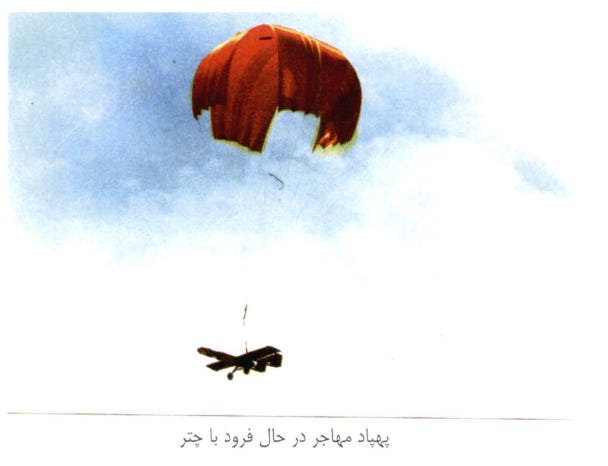
The experience gained from operating Talash aircraft eventually led to the development of a more capable reconnaissance platform: the Mohajer UAV. Compared to the earlier Talash models, Mohajer incorporated a stronger engine, improved endurance, and a more stable airframe capable of carrying heavier camera systems. These improvements allowed the aircraft to fly deeper behind Iraqi lines and capture clearer imagery of defensive networks, artillery positions, and troop deployments.
The First Iranian Drone Unit
As these experimental aircraft began producing usable reconnaissance imagery, the IRGC leadership moved to institutionalize the effort. A dedicated UAV reconnaissance element was formed under the name Raʿd Battalion, an intelligence unit tasked with supplying aerial photography to operational planners. The battalion was first stationed in Ahvaz, near the main southern fronts, and later operated from encampments closer to active battle zones under the supervision of Khatam al-Anbiya Headquarters, the IRGC’s central operational command. In practice, Raʿd never possessed the personnel or structure implied by the term “battalion”; it was a small group of pilots, technicians, and engineers working with improvised equipment and experimental aircraft. Its purpose was narrowly defined but operationally critical: to replace the aerial imagery that had previously been supplied by RF-4 and F-5 reconnaissance flights, which had become increasingly restricted due to aircraft shortages and the risks of flying over heavily defended Iraqi territory.

Despite its modest size, the unit quickly became an important intelligence asset. Raʿd’s UAV teams conducted reconnaissance flights over Iraqi defensive positions and returned with aerial photographs that were rapidly developed and distributed to commanders for operational planning. These images were used to redraw battlefield maps, identify minefields and fortified positions, locate artillery and troop concentrations, and verify or correct information gathered through ground reconnaissance. In several respects the UAV imagery proved superior to earlier reconnaissance methods. Because the aircraft flew at relatively low altitudes and could approach specific target areas repeatedly, they produced close-range images from multiple angles that high-altitude aircraft often failed to capture. The photographs were also processed and delivered more quickly than traditional aerial reconnaissance imagery.
From Mohajer to Shahed
After the Iran–Iraq War, the UAV effort that had begun as an improvised reconnaissance program gradually evolved into a structured research and production effort inside Iran’s defense industry. The early Mohajer and Ababil drones provided the technological foundation. Mohajer remained primarily a reconnaissance platform, evolving through successive variants such as Mohajer-2, Mohajer-3, and Mohajer-4, while the Ababil family developed into a versatile UAV used for surveillance, target acquisition, and occasionally attack missions.

Much of the technological progress in the 1990s and 2000s came from a combination of reverse engineering, battlefield capture, and gradual adaptation of foreign systems. Iranian engineers studied the designs of Israeli UAVs that had appeared over Lebanese and Palestinian battlefields, and some later Iranian systems closely resembled aircraft such as the Israeli Hermes-450. In fact, the Iranian Shahed-123 reconnaissance drone was essentially a reverse-engineered version of the Hermes-450 design.
Iran also acquired additional insight into Western drone technology through captured systems. In 2011, Iranian forces brought down a U.S. RQ-170 Sentinel stealth reconnaissance drone that had been operating over Iranian territory from Afghanistan. The captured drone became a major windfall for Iran’s drone development program. Iranian engineers subsequently produced several UAVs modeled on the aircraft’s flying-wing configuration, including the Shahed-171 Simorgh and Shahed-191 Saeqeh, both of which replicate aspects of the Sentinel’s design and incorporate Iranian avionics and weapons systems.
Iran continued developing larger surveillance and strike drones with more conventional airframes. One of the most important of these was the Shahed-129, a medium-altitude long-endurance drone developed in the 2000s and introduced publicly in the early 2010s.
The most widely recognized Iranian drone today, however, is the Shahed-136, a loitering munition designed to fly long distances and strike targets directly rather than return to base. Unlike the Mohajer and Ababil systems, which grew out of the reconnaissance drones developed during the Iran–Iraq War, the Shahed family reflects a different technological lineage tracing back to West German research on anti-radar drones, particularly the Drohne Anti-Radar project. Variants of this idea later appeared in South Africa in the 1980s, before reaching a more mature operational form with Israel Aerospace Industries’ Harpy in the 1990s, a loitering munition designed to destroy enemy radar systems. By the 2000s, Iranian engineers appear to have gained access—through reverse engineering or indirect acquisition—to elements of this technology. The result was the Shahed-131 and later the larger Shahed-136, which adapted the loitering munition concept to Iran’s strategy of low-cost, long-range systems that can be deployed in large numbers. Today, Iran, Russia, Israel, the Houthis, and the United States all have some connection to the Shahed.
Anyway, here is the book for those who can read Persian (پهپاد در دفاع مقدس).